
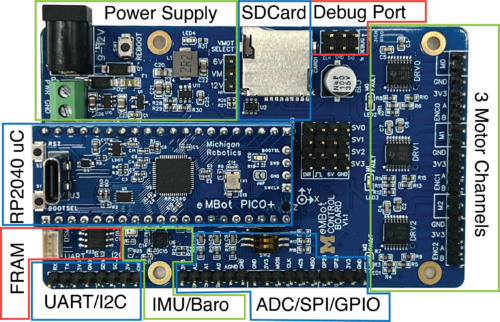
The MBot Control Board is the backbone of an MBot platform. It uses the Raspberry Pi Pico microcontroller as a backbone and handles motor and low-level sensor control. The board communicates with the Raspberry Pi via a serial connection.
How to get the Robotics Control Board?
- Buy from the University of Michigan
- Order your own PCB using our Gerber Files
Features
Motor control capabilities
- Drives 3 brushed DC motors with current and relative position feedback via quadrature encoders
- Each motor channel powered by TI DRV8876 driver (1.3A continuous current)
- Motor voltage selectable via onboard jumper: applied DC voltage or onboard 6V, 4A regulator
- Additional control signals allow driving 4 external motor drivers
- Any motor channel can be reconfigured to drive a hobby servo motor
Onboard sensors and data fusion
- 9-DOF MEMS IMU (Bosch BMI160B) with:
- Gyroscope
- Accelerometer
- Magnetometer (Bosch BMM150)
- Barometer (Bosch BMP280) for altitude estimation
- Nonvolatile memory for onboard calibration data and parameters
- SD card connector for onboard data logging without host computer
Connectivity and expansion
- Ports for I2C and SPI communication with external devices
- 3 ADC channels switchable between motor current sensing and external voltage measurement
Debugging and programming support
- Debug pins for soft/hard resets, program loading, and software debugging
- Supports tools like the GNU Debugger (GDB)